Di Paolo Omodei Zorini
Nota di Luca Masali, direttore responsabile di DronEzine
Come sappiamo, ENAC ha fatto importanti aperture ai SAPR ultraleggeri, quelli sotto i 300 grammi: non occorre il “patentino” per le operazioni specializzate, e per loro tutte le operazioni sono non critiche, in tutti gli ambiti operativi, anche in città, con l’unica limitazione che il sorvolo degli assembramenti di persone è sempre vietato.
Oltre a pesare meno di 300 grammi, devono anche rispettare la velocità massima di 60 km/h. ENAC non specifica di che velocità si tratti, e mai cita la velocità di caduta. peraltro, l’Ente non specifica nemmeno che i 60 km/h siano da intendersi come velocità orizzontale di traslazione, ma ci pare interessante analizzare la velocità con cui un drone in avaria può impattare al suolo (o peggio, contro un’auto, una moto, un bambino).
Paolo Omodei Zorini di Alphalima, Organizzazione di Consulenza riconosciuta da ENAC, ha fatto calcoli molto approfonditi (che pubblicheremo integralmente nel prossimo numero di DronEzine Magazine, in circolazione da metà novembre).
Una interessantissima analisi matematica e aerodinamica del fenomeno, che al di là degli eventuali effetti (ancora tutti da dimostrare) sul regolamento e sull’operatività dei micro-SAPR, dà al pilota gli strumenti per rendersi ben conto della responsabilità che si assume nelle operazioni specializzate con SAPR ultraleggeri.DESCRIZIONE COMPLETA CON FORMULE MATEMATICHE SU DRONEZINE MAGAZINE DI NOVEMBRE/DICEMBRE (disponibile attorno a metà novembre)
———
Il regolamento che disciplina l’operatività dei SAPR con massa massima al decollo uguale o inferiore ai 300 g permette sicuramente numerosi vantaggi per l’utenza professionale. Contemporaneamente però, esso presenta nuove sfide per i costruttori specialmente su due aspetti quali il mantenimento delle masse entro valori contenuti e l’impossibilità di superare i 60 km/h al fine di garantire una bassa energia cinetica in caso di impatto. Visti i parametri stabiliti dal legislatore, l’energia non dovrebbe poter superare i 41 2/3 J1.
Un aereo ad ala fissa con MTOM minore o uguale a 0,3 kg non avrebbe comunque alcuna problematica nell’essere operato al di sotto di tale energia cinetica. Basterà limitare nel sistema di controllo di volo l’angolo di incidenza in modo tale da non permettere allo stesso di scendere sotto il valore necessario a permettere il volo alla velocità richiesta dal regolamento. In caso di avaria del sistema automatico, opportuni accorgimenti meccanici atti ad agire sugli angoli di barra del sistema di controllo del beccheggio (generalmente timone di profondità o elevoni) potranno limitare efficacemente la velocità di volo.
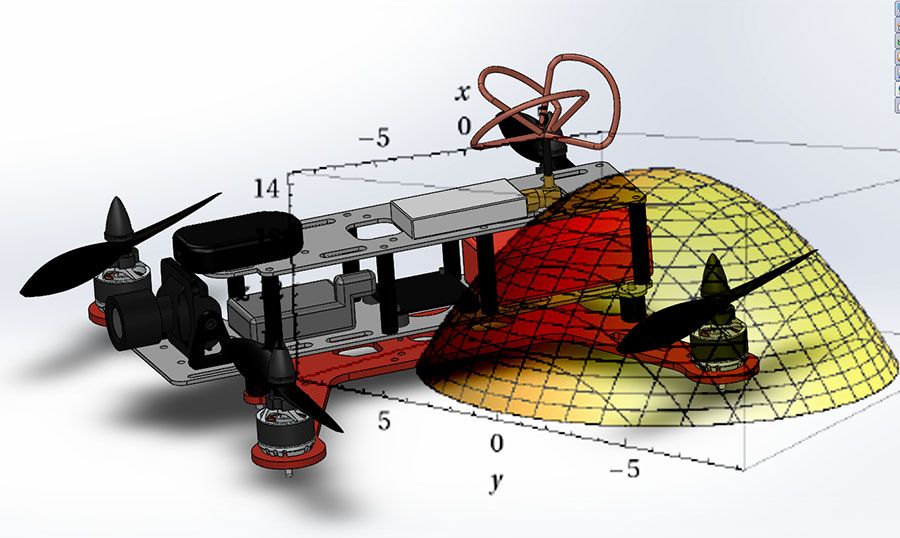
La velocità terminale di caduta di un sistema multirotore avente le caratteristiche suddette si ottiene semplicemente eguagliando il peso alla resistenza aerodinamica. I costruttori dovrebbero conoscere esattamente il coefficiente di resistenza dell’aeromobile ma spesso occorre comunque ricavarlo attraverso elementari sperimentazioni in galleria del vento. Unendo nell’equazione anche la velocità di traslazione e l’altezza di volo, si può estraorapolare la curva di velocità di impatto al suolo di un piccolo quadrirotore in avaria, che prende la forma di questo grafico (che ci sembra simile a un gelato zuccotto, a dire il vero, ndr):
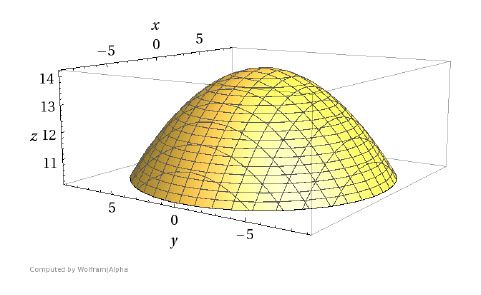
Dove sull’asse Z c’è la quota di volo espressa in metri, in x e y le velocità di translazione per non far superare al drone la velocità di 60 km/h anche in caso di avaria catastrofica. Da ciò si evince che per avere una velocità di impatto al suolo non superiore a 60 km/h, l’apr dovrà volare alla quota massima di 14 metri, ma solo nel caso in cui non siano previste traslazioni (hovering fuori effetto suolo). In caso di traslazioni in una qualsiasi direzione, occorrerà preventivamente determinare l’altezza massima per poter operare con le velocità orizzontali desiderate. Se la centralina non fosse così raffinata da poter programmare quanto esposto, sarà comunque sempre possibile limitare la velocità orizzontale di volo in funzione dell’altezza desiderata.