Il 2021 è decisamente l’anno del FPV, il pilotaggio in prima persona che coinvolge in modo particolare i piloti, ma anche gli spettatori, regalando punti di vista ed emozioni davvero importanti.
Con l’avvento del regolamento europeo dai primi giorni dell’anno 2021 viene permesso per l’appunto il pilotaggio in FPV dei droni a patto di avere un osservatore a fianco che controlli sempre la traiettoria del drone e lo spazio aereo circostante.
Nello stesso tempo DJI leader incontrastato nel settore droni consumer, prosumer e professionali ha introdotto sul mercato il suo drone DJI FPV con la volontà di far avvicinare a questa disciplina il maggior numero di appassionati.
[leggi anche la nostra recensione sul drone DJI FPV]
Un tipo di volo in prima persona, molto sicuro e facilitato, che registra riprese stabilizzate davvero accattivanti.
I piloti di FPV che usano droni appositamente auto costruiti storcono il naso di fronte al neonato di Shenzen, ma la battaglia finale, soprattutto per chi vuole fare del pilotaggio in FPV a livello professionale, nasce proprio sulla qualità e la stabilizzazione delle clip registrate.
In molti lo sapranno, ma non tutti sono a conoscenza che la stabilizzazione delle riprese effettuate da un drone, può essere ottenuta con il giunto cardanico meglio conosciuto come gimbal meccanico, ma anche con la stabilizzazione software.
In questo articolo di Jonathan Filippi, viene spiegato dalla A alla Z come realizzare al stabilizzazione elettronica delle riprese di un drone registrate con una Action Cam, stile GoPro o DJI Action ad esempio, e confrontarle con quelle realizzate ad esempio dall’ultimo DJI FPV.
Senza farne una guerra di religione e creare fanboys da una parte all’altra, ma con una vera convinzione di poter imparare a padroneggiare la più recente tecnologia.
 Articolo a cura di Jonathan Filippi
Articolo a cura di Jonathan Filippi
Riprese FPV stabilizzate con tutte le action cam? La risposa è Gyroflow!
Riprese FPV stabilizzate con tutte le action cam? La risposa è Gyroflow!
Piccola guida Mini HowTo per la configurazione del programma di stabilizzazione di video registrati con i droni GyroFlow
Indice
Introduzione alla stabilizzazione con GyroFlow:
Probabilmente avete visto le spettacolari riprese aeree cinematiche di Ellis Van Jason su Madeira o le coinvolgenti immagini della fontana di Trevi di Nils Astrologo chiedendovi come sia possibile ottenere immagini così fluide e prive di vibrazioni e micro-correzioni.
Se volate in FPV sapete quanto sia complicato essere “morbidi” e evitare “sovra-correzioni”. Se notate, molte di queste riprese sono presentate o con un’unica sequenza o comunque con lunghe sequenze senza tanti tagli, ciò presuppone che ogni errore, seppur minimo, significhi il dover ripetere in toto l’intera sequenza.
Ovviamente dietro tali voli ci sono pollici d’oro e nervi d’acciaio, acquisiti in anni e anni di esperienza di volo FPV, oltre ad una meticolosa preparazione e pianificazione al fine di mantenere la sicurezza e ottenere un risultato soddisfacente. È doveroso inoltre puntualizzare che i “quad” (termine usato dagli FPVisti, che d’ora in poi useremo per semplicità) sono ottimizzati al massimo per annullare le vibrazioni ed eliminare l’effetto jello (croce di molte riprese FPV), spesso dagli stessi piloti che sono anche progettisti e costruttori delle loro macchine.
Ma veniamo al dunque. Nelle riprese FPV cinematiche tranne rarissimi casi, la telecamera di ripresa è solidale al telaio del quad, senza alcun gimbal, con un angolo predefinito rispetto al telaio e rispetto alla IMU (Inertial Measurement Unit).
Ciò fa sì che qualsiasi variazione di assetto del mezzo si traduce in una variazione dell’inquadratura di ripresa.
Tali variazioni, se brusche e non “coerenti” con la composizione delle riprese, risultano fastidiose e distraggono chi le guarda. Molte action cam come la GoPro Hero e la DJI Osmo Action hanno internamente un sistema di stabilizzazione delle immagini (Hypersmooth™ per GoPro e RockSteady™ per la DJI) basato su trasformazioni come rotazioni/crop/traslazioni che funzionano in modo soddisfacente seppur non sempre ottimale ai fini dell’ottenimento di una ripresa veramente fluida.
Software di terze parti per la stabilizzazione elettronica delle riprese con droni FPV
E qui allora entrano in gioco software di terze parti che permettono di stabilizzare le riprese in post-produzione, come ReelSteady e Gyroflow (ma ne esistono anche altri).
La particolarità di questi software è l’elaborare e stabilizzare l’immagine non solamente attraverso il flusso ottico ma anche avvalendosi dei dati inerziali relativi all’assetto.
Nel caso di ReelSteady, il software compatibile in modo nativo esclusivamente con alcuni modelli GoPro Hero (6,8 e 9) equipaggiati con una IMU interna, i quali dati vengono riversati nei metadati del video e permettono l’ottenimento di riprese veramente fluide e “morbide” nella stabilizzazione in post.
E gli altri modelli privi di IMU?
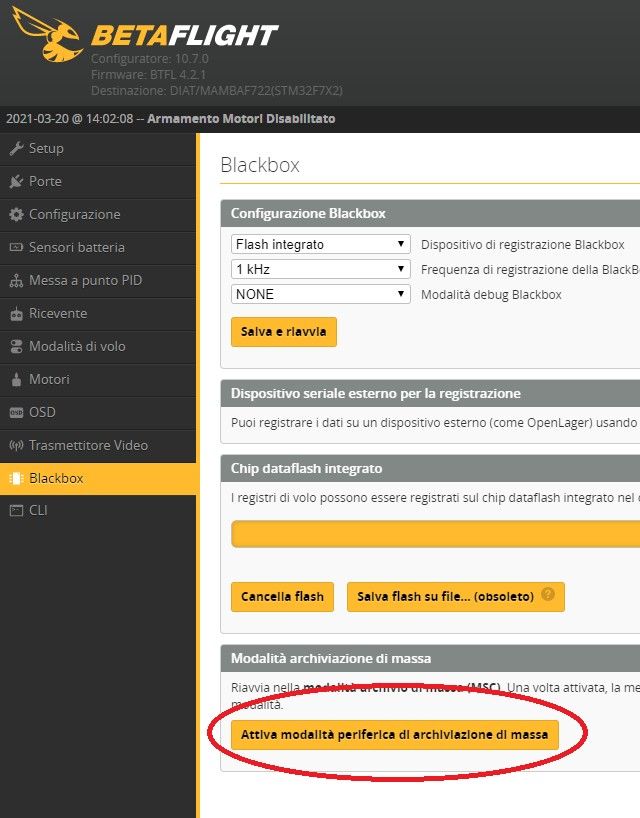
Nessun problema, perché come detto precedentemente, l’action cam è solidale al telaio (con un angolo di inclinazione fisso) che a sua volta è solidale alla IMU della FC (flight control) del quad. Se la vostra FC prevede la registrazione della “blackbox” su memoria interna o su scheda SD, quei dati sono disponibili per essere consultati o utilizzati. Ad esempio è possibile “iniettare” tramite un tool tali dati nei metadata del file video e dare tutto in pasto a ReelSteady.
Finito?
No, perché è necessario assicurarsi che tali dati siano sincronizzati perfettamente al “flusso video” dato che la ripresa parte dalla pressione del tasto rec, mentre la registrazione dei dati della FC parte dal momento in cui i motori vengono armati. La sincronia è fondamentale affinché la correzione sia efficace, altrimenti potrebbe addirittura amplificare gli errori. E allora come si procede?
È possibile sincronizzare i dati avvalendosi di vari escamotage dei quali però non parleremo dato che l’argomento dell’articolo è GyroFlow e non ReelSteady.
Nota: ciò che illustrerò vale squisitamente per le FC con installato Betaflight con attivata la registrazione su SD o su memoria interna dei dati inerziali.
Funzionamento:
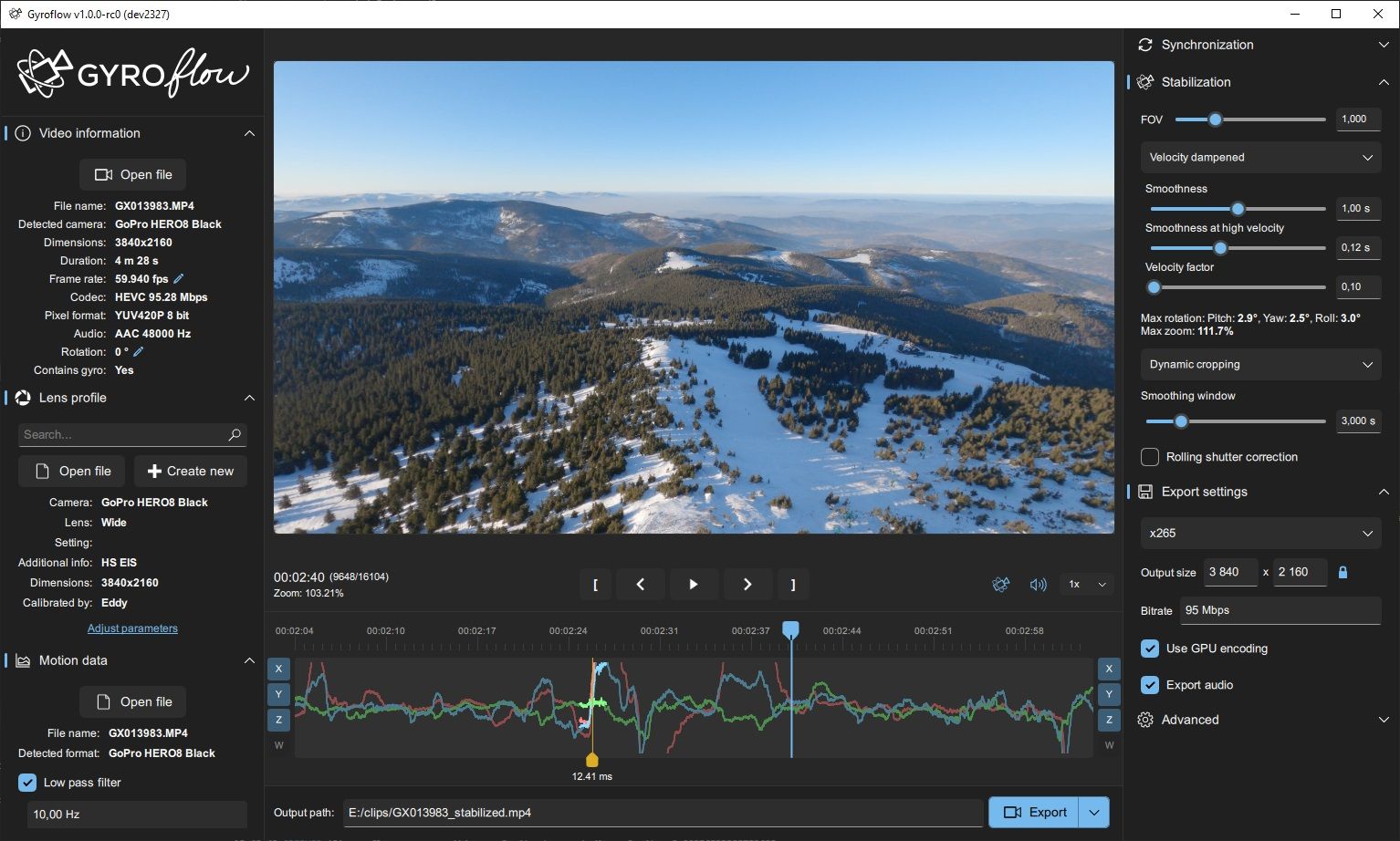
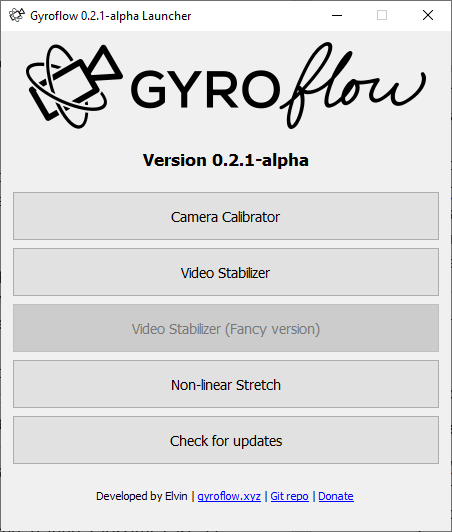
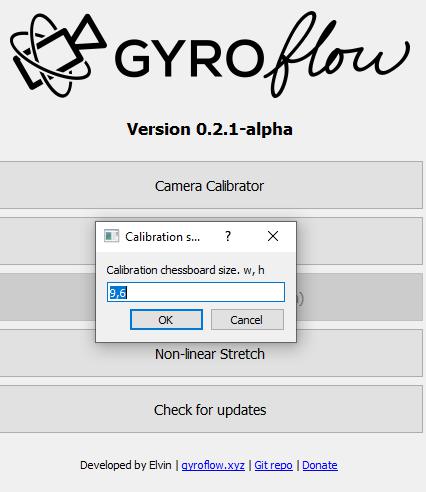
GyroFlow, software open-source e completamente gratuito (anche se una libera donazione sarebbe sicuramente gradita) scritto e ideato da Elvin Chen (ElvinC su github) che potete scaricare qui, sia in versione Python che standalone exe.
Per ora è in versione alpha, che è quella che ho testato personalmente. Tale software si avvale dei dati inerziali della FC registrati da Betaflight per stabilizzare le riprese e comprende i seguenti moduli:
un sistema di calibrazione della camera, importantissimo sia per il rendering che per la sincronia.
Un modulo di sincronizzazione che confronta il flusso ottico con i dati della IMU ottenendo la sincronia perfetta tra video e dati della FC.
Il modulo di stabilizzazione vero e proprio che tramite operazioni di rotazione/crop/similarità compensa i movimenti dell’inquadratura dati dall’assetto del quad, addolcendoli. Nel modulo di stabilizzazione potete decidere il crop che volete utilizzare e quale porzione del video renderizzare. Potete inoltre decidere “la forza” della stabilizzazione cambiando la costante di tempo (di default 0.2s circa, che rappresenta un ottimo compromesso). Attenzione: esagerare con la stabilizzazione può portare ad un eccessivo ritardo nelle reazione del software di stabilizzazione, portando l’inquadratura “fuori crop”.
Flusso di lavoro:
Sul campo:
a) verificate sempre, prima di ogni volo che la memoria blackbox sia sufficiente dato che questi dati servono anche per eventuali troubleshooting dei vostri mezzi. Senza quei dati, in particolare, non è possibile stabilizzare il vostro video e rimarrete con un pugno di mosche a mangiarvi le mani per aver magari perso una ripresa meravigliosa. b) impostate la vostra action cam correttamente: scegliete la risoluzione che vi si confà maggiormente, anche se consiglio la massima possibile dato che poi verrà fatto un crop; il massimo campo visivo possibile (se possibile usate tutto il sensore, ad esempio 4:3 per la DJI Osmo Action che io uso) sempre per lo stesso motivo; impostate lo shutter tra 2x e 4x della vostra framerate (non oltre se volete l’effetto motion blur) e usate i filtri ND adeguati per evitare di bruciare la vostra esposizione. Disattivate la correzione della lente perché, ancora una volta, va a togliere campo visivo. IMPORTANTISSIMO: disattivate la stabilizzazione elettronica della vostra cam! c) decollo: prima di decollare, al termine della vostra checklist, fate partire la registrazione dalla action cam e fatele inquadrare la vostra radio nel momento in cui commutate lo switch di armamento dei motori, questo piccolo accorgimento vi permetterà di essere più rapidi nella sincronizzazione successiva. d) Volo e termine del volo: cercate di essere il meno bruschi possibile: evitate correzioni eccessivamente violente (tranne qualora dobbiate evitare un crash, ovviamente) e eventuali trick come lo split-S o il dive devono essere costanti, puliti e fluidi. Questo per evitare che il software, nel tentativo di stabilizzare manovre troppo violente, vada fuori crop, facendo apparire delle “simpatiche” bande nere ai bordi della vostra composizione
A casa:
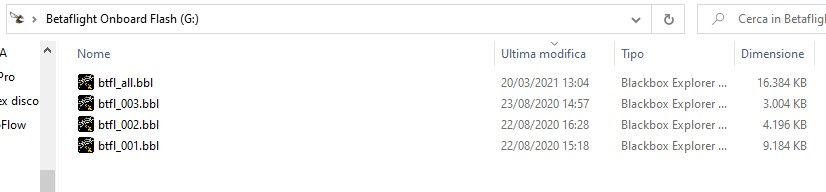
per prima cosa copiate in una cartella i file video dalla vostra actioncam e i file blackbox dalla SD della vostra FC o tramite betaflight
i file sono registrati in ordine cronologico e se avete un GPS collegato alla vostra FC, l’orario corrisponderà a quello quando è stato eseguito il vostro volo.
Calibrazione della action cam:
Se non lo avete ancora fatto, procedete alla calibrazione della vostra action cam usata per le registrazioni in alta definizione, con le stesse impostazioni con le quali avete effettuato le vostre riprese.
Il programma di chiederà di specificare quanti quadrati dovrà avere la scacchiera di calibrazione. Io suggerisco di usare un rapporto di righe e colonne pari al vostro rapporto di aspetto del video, ad esempio per il 4:3 suggerisco di usare 12,9 come valori.
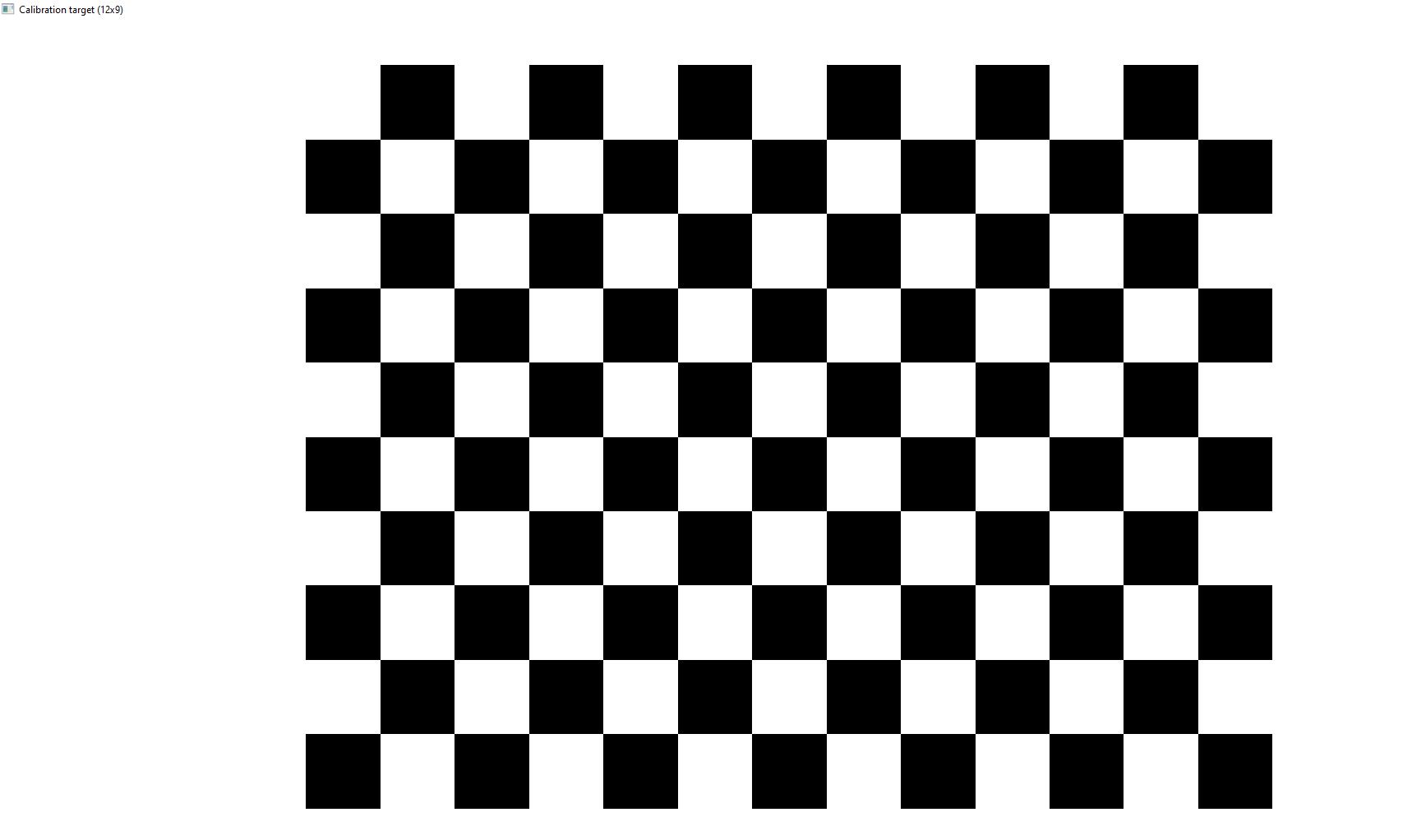
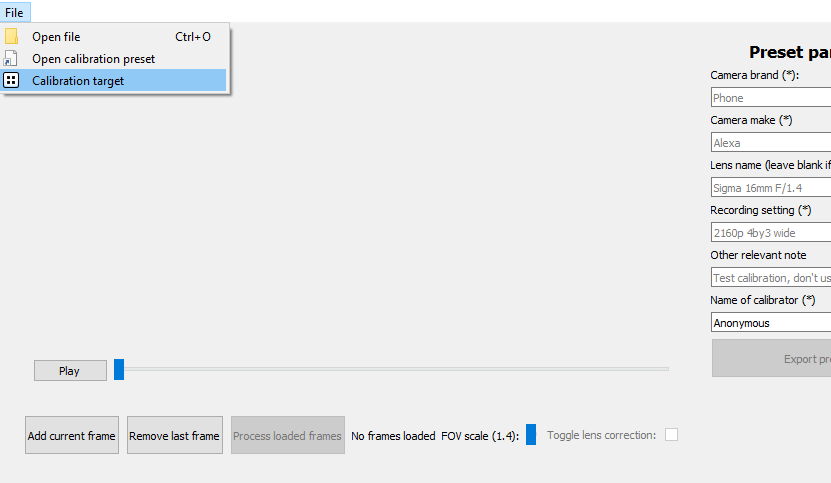 Vi apparirà una scacchiera che dovrete riprendere da tutte le angolazioni possibili (sopra, sotto, destra, sinistra e dagli angoli) con la vostra action cam. Una volta finito potete chiudere la finestra e caricare il file video nel tool di calibrazione. Fatto ciò indicate al programma i frames che volete fare analizzare al calibratore (minimo 9, meglio se 15-20).
Vi apparirà una scacchiera che dovrete riprendere da tutte le angolazioni possibili (sopra, sotto, destra, sinistra e dagli angoli) con la vostra action cam. Una volta finito potete chiudere la finestra e caricare il file video nel tool di calibrazione. Fatto ciò indicate al programma i frames che volete fare analizzare al calibratore (minimo 9, meglio se 15-20).
 Ogni frame dopo l’aggiunta mostrerà il lock sui nodi tramite delle linee colorate. Una volta finito fate elaborare il programma premendo “process loaded frames” e se tutto è andato correttamente, mettendo la spunta su “toggle lens correction” dovreste essere in grado di vedere il video di calibrazione correttamente linearizzato.
Ogni frame dopo l’aggiunta mostrerà il lock sui nodi tramite delle linee colorate. Una volta finito fate elaborare il programma premendo “process loaded frames” e se tutto è andato correttamente, mettendo la spunta su “toggle lens correction” dovreste essere in grado di vedere il video di calibrazione correttamente linearizzato.
Inserite i dati richiesti e salvate il preset in una cartellina.

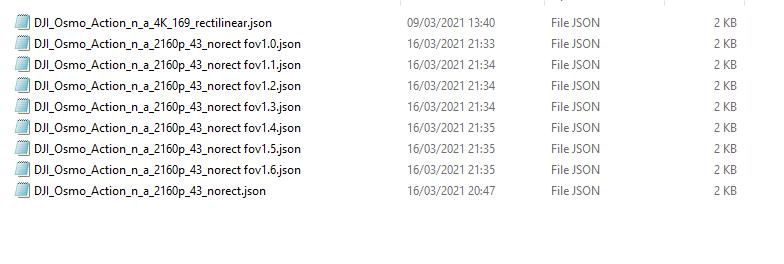
Vi consiglio di salvare una versione per ogni FOV che volete utilizzare, spostando lo slider “fov scale” e salvando nuovamente aggiungendo fovX.X come suffisso al file.
Questa operazione è necessaria solo una volta, a parità di risoluzione e larghezza di campo visivo.
Sync tra video e dati Blackbox
Per prima cosa è necessario aprire il file Blackbox di Betaflight con Betaflight Blackbox Explorer (https://github.com/betaflight/blackbox-log-viewer/releases) programma che permette di visualizzare i dati di assetto del vostro mezzo ed esportarli in formato CSV (necessario per GyroFlow).
Oltre a questo serve per capire sommariamente il delay tra rec e arm, in modo da agevolare Gyroflow nella ricerca del sinc.
Cliccate sul file blackbox e aprite così il software Blackbox explorer.
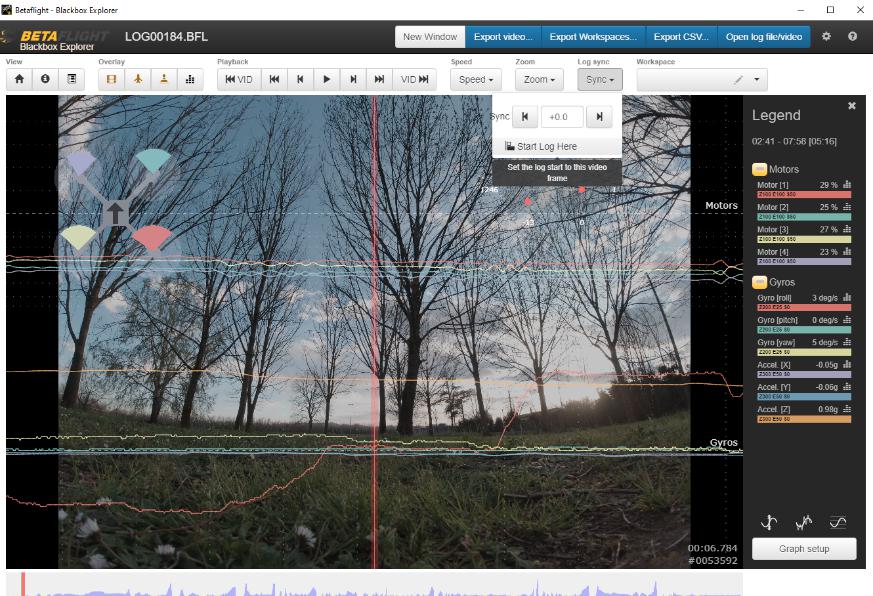 Una volta aperto, caricate il video premendo “open log file/video”.
Una volta aperto, caricate il video premendo “open log file/video”.
Il programma sovrapporrà i dati della FC in sovrimpressione al video.
Scorrete e cercate il momento nel quale, nei video, armate i motori e premete start log here.
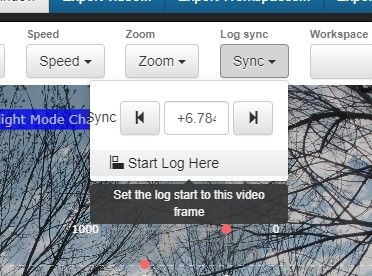
Annotatevi questo numero (è il ritardo tra rec e arm, vi servirà dopo). Infine esportate in CSV il vostro file log.
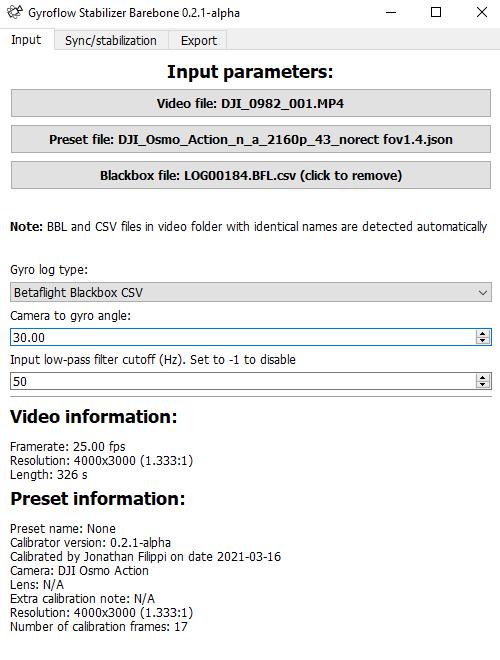
Riaprite GyroFlow e caricate i tre file necessari:
il video, il file blackbox in csv, il vostro preset corrispondente alla cam e ai parametri che avete usato. Inoltre impostate l’angolo che ha la vostra cam rispetto al telaio del vostro mezzo.
Inserite 50Hz come low pass filter (consiglio 2x della vostra framerate) per i dati della blackbox.
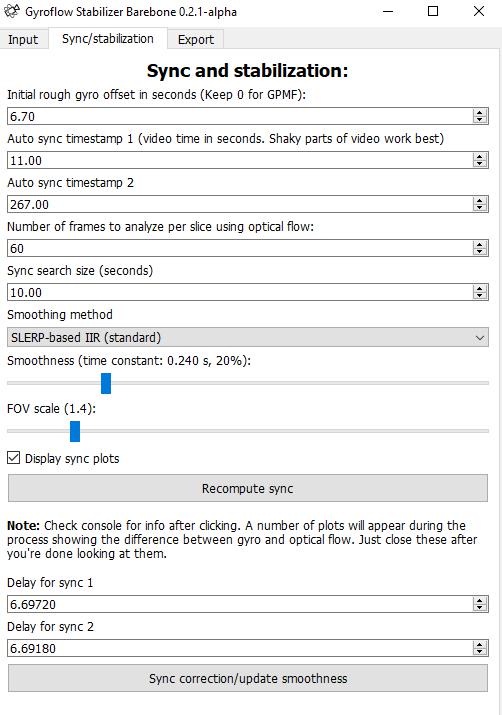
Passate alla scheda Sync:
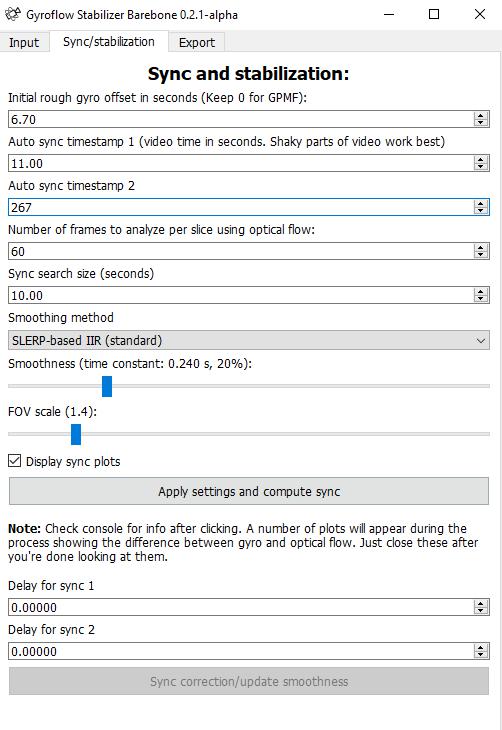 Nel primo campo inserite il valore sommario che avete rilevato su Betaflight BlackBox Explorer.
Nel primo campo inserite il valore sommario che avete rilevato su Betaflight BlackBox Explorer.
Poi scegliete due punti dei video nei quali volate livellati e vedete un po’ di vibrazioni di roll e pitch. Impostate la fov relativa al preset cam che avete caricato e premete “apply settings and compute sync”.
Il programma analizzerà e confronterà il flusso ottico per poi mostrarvi dei grafici di minimizzazione dell’errore.
Chiudeteli pure una volta che li avete consultati.
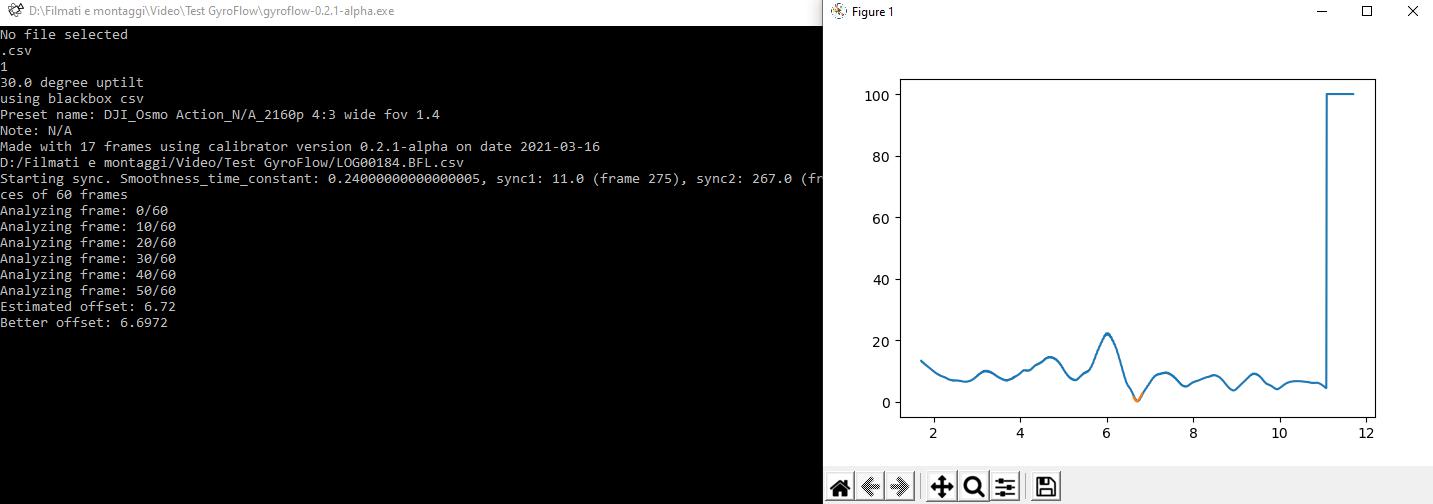
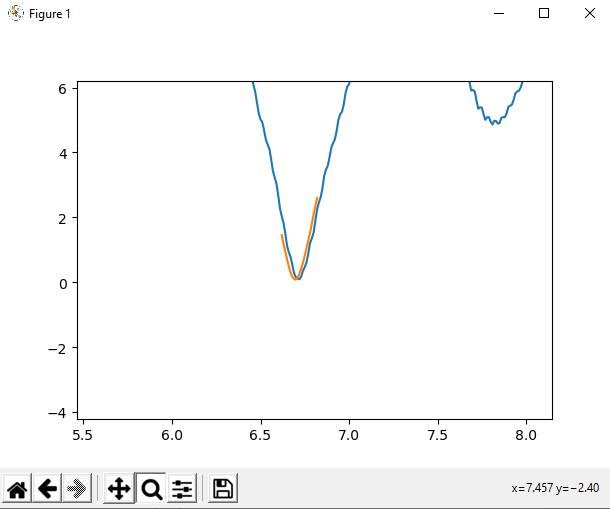
Ingrandendo la zona con il minimo locale dovreste essere in grado di vedere dove l’errore tra flusso ottico e dati del gyro si azzera. È bene che tale minimo locale sia quanto più vicino allo zero per un buon sincro.
Lo stesso per il secondo punto di sincro:
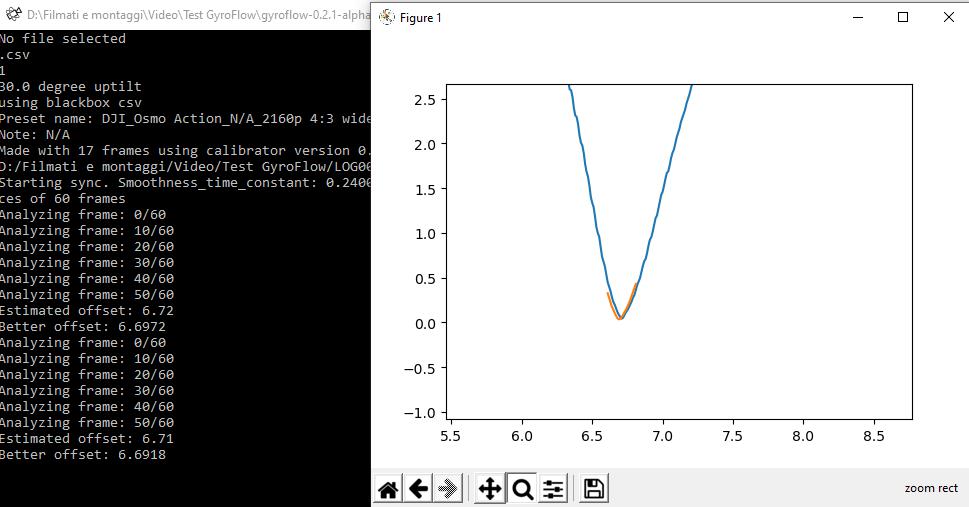
Una volta chiuso questo grafico, il programma calcolerà l’errore lungo l’intero video. E vi mostrerà l’ennesimo grafico
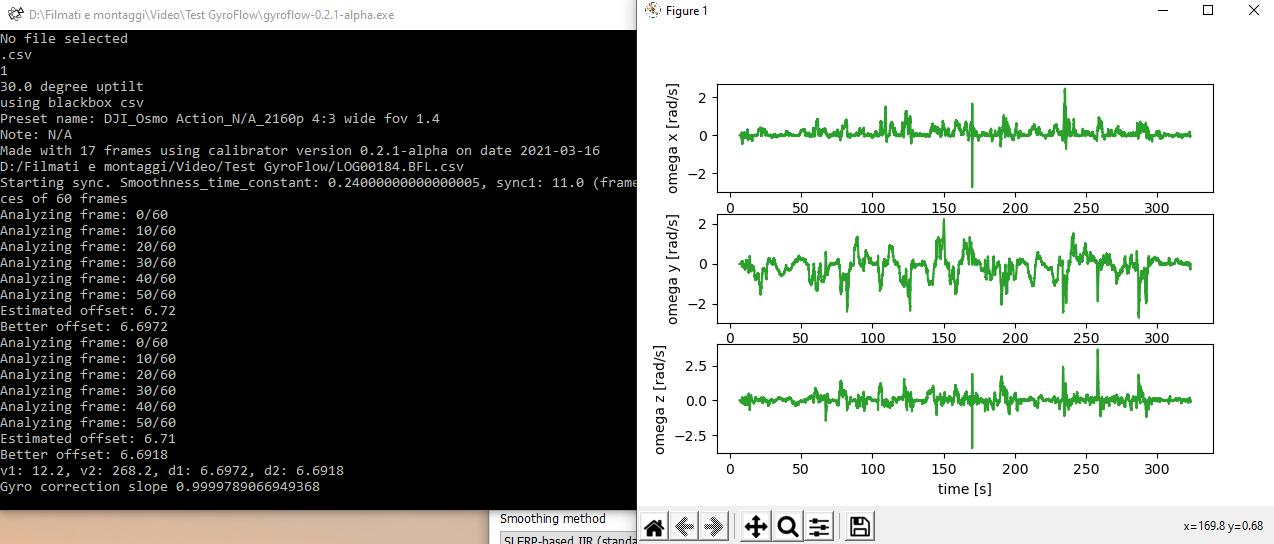
Se è tutto verde, significa che il lock è stato trovato. Potete chiudere il grafico. Il programma aggiornerà in autonomia il ritardo e lo inserirà negli spazi in fondo.
Potete anche agire autonomamente su tali valori per una correzione fine finale, vi consiglio di muovervi di 10 in 10 millisecondi se volete “raffinare” il risultato.
Esportazione
Cliccate sulla scheda export: vi si aprirà una finestra dove potete inserire i parametri finali del video, come risoluzione, bitrate, taglio temporale e se usare l’encoding hardware.
Consiglio, prima dell’esportazione finale (che richiederà qualche minuto), di provare degli spezzoni di video di pochi secondi e verificare se la stabilizzazione è efficace e, qualora non lo sia, tornare alla scheda precedente per raffinare spostando il sinc manualmente di 10 ms (in entrambe le direzioni per capire se migliora o peggiora) e premendo “sync correction/update smoothness”.
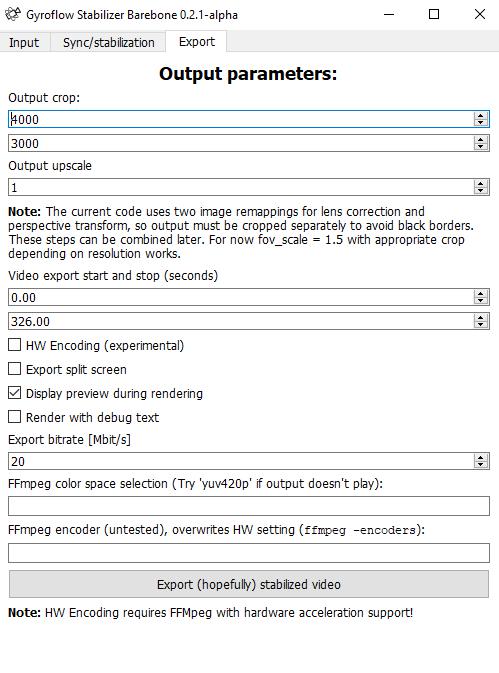 Solitamente il delay non cambia durante il video, quindi potete mettere lo stesso valore ad entrambi i campi. Tornate su export e verificate se notate miglioramenti. Una volta che il risultato vi soddisfa, esportate l’intero video.
Solitamente il delay non cambia durante il video, quindi potete mettere lo stesso valore ad entrambi i campi. Tornate su export e verificate se notate miglioramenti. Una volta che il risultato vi soddisfa, esportate l’intero video.

Consiglio: se riprendete in 4k vi consiglio di esportare in 2.7K per evitare che, nelle manovre brusche, l’inquadratura vada fuori crop.
Inoltre vi consiglio di impostare la stessa bitrate del file di partenza.
Una volta elaborato, potete montare il file con il vostro programma preferito di video editing di clip registrate con i droni.
Video finale con stabilizzazione software
Breve esempio di video registrato con un drone da FPV racing e action cam DJI OSMO Action stabilizzato con il software Gyroflow.