Un kit per sviluppatori, messo a disposizione da Parrot, che permette ai droni di evitare gli ostacoli e favorirne la navigazione autonoma, negli stati dove la legge lo permetta.
Lo hanno chiamato S.L.A.M. dunk il cui acronimo significa Simultaneous Localization and Mapping. Utilizza alcuni sensori che permettono al sofisticato algoritmo di mappare l’ambiente circostante producendo mappe 3D (tri dimensional), eseguire una navigazione interna senza usare il dispositivo GPS e sopratutto di aggirare gli ostacoli che si presentano sul suo cammino, pardon volo.
Un develpment kit aperto destinato a programmatori, ricercatori o accademici. Leggero, pesa solo 140 grammi e facilmente installabile su droni che funzionino con sistemi operativi Linux.
Necessita di una alimentazione e un cavo USB diretto al sistema autonomo a pilotaggio remoto. Al suo interno batte un cuore potente, un processore NVIDIA® Tegra® K1 che consente l’implementazione dei più recenti algoritmi di visione computerizzata e di navigazione autonoma che sono ottimizzati per NVIDIA® GPU.
Comprende una serie sofisticata di sensori che gli permettono alcuni tipi di funzioni avanzate. A bordo ospita infatti:
• Una videocamera stereo fish-‐eye con risoluzione 1500×1500 a 60 fps
• Un’unità di misura inerziale (IMU)
• Un sensore a ultrasuono
• Un magnetometro
• Un barometro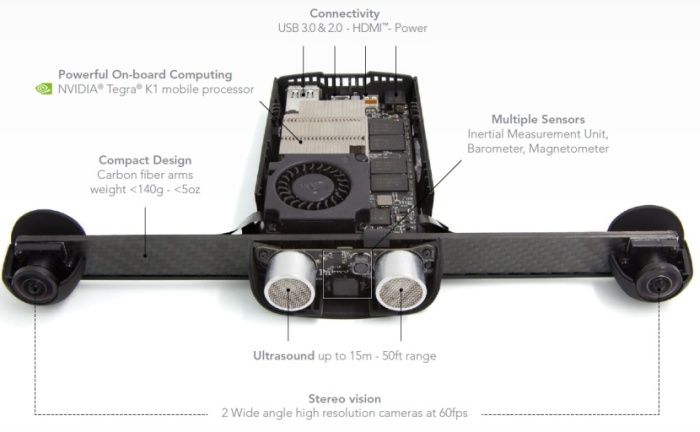
Un kit per smanettoni, creato da ingegneri robotici per altri ingegneri robotici, che permetterà però a questi ultimi, di concentrarsi sul risultato finale piuttosto che sui noiosi passaggi intermedi, lasciando al Parrot SLAM dunk, il compito di eseguire complicate elaborazioni e calcoli relativi al suo posizionamento nello spazio evitando ostacoli. I ricercatori potranno installare questo kit, su quadricotteri, droni ad ala fissa o altri mezzi robotici, quali robot rotanti o braccia articolate remotate.
Non è conosciuto al momento il prezzo del kit, si parla solo della disponibilità presunta entro l’ultimo trimestre 2016.
Maggiori info sul sito dedicato agli sivluppatori di Parrot che fa parte del progetto DroneCode