Trovare gli escursionisti perduti nelle foreste può essere lungo e difficile, né gli elicotteri né i droni riescono a dare un’occhiata attraverso la spessa chioma degli alberi. Ma sciami di droni autonomi progettati al MIT potranno presto avventurarsi attraverso gli alberi, là dove è buio e il GPS non può arrivare.
In un documento che sarà presentato al Simposio internazionale sulla robotica sperimentale la prossima settimana, i ricercatori del MIT descrivono un sistema autonomo per una flotta di droni per la ricerca collaborativa sotto un denso tetto di foresta. I droni utilizzano solo la potenza di calcolo a bordo e la comunicazione wireless, senza GPS.
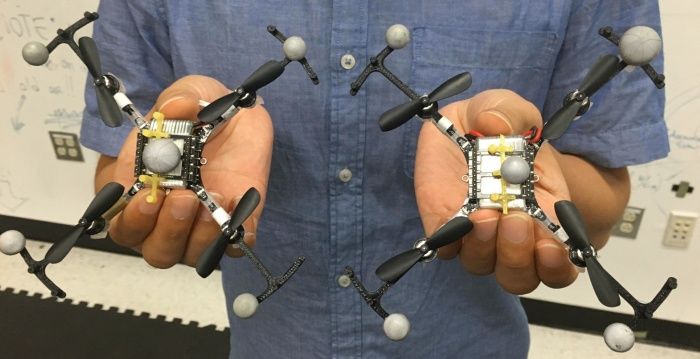
Ogni drone autonomo è equipaggiato con cercatori laser per la stima della posizione, la localizzazione e la pianificazione del percorso. Mentre il drone vola, crea una mappa tridimensionale del terreno. Gli algoritmi aiutano a riconoscere gli spot inesplorati e quelli già cercati, quindi il drone sa quando è mappata completamente un’area e il disperso non è stato trovato, quindi è ora di spostarsi in un’altra area. Una stazione di terra unisce le singole mappe di tutti droni in un’unica mappa globale 3-D che può essere monitorata da soccorritori umani.
In un’implementazione del mondo reale, ancora tutta da sviluppare, i droni potrebbero essere dotati di intelligenza artificiale per identificare l’escursionista scomparso. Quando lo trova, il drone etichetta la posizione dell’escursionista sulla mappa globale. Gli umani potrebbero quindi utilizzare queste informazioni per pianificare una missione di salvataggio.
“Essenzialmente, stiamo sostituendo gli umani con una flotta di droni per rendere più efficiente il processo di ricerca e salvataggio”, afferma Yulun Tian, leder del gruppo di ricercatori e studente laureato nel dipartimento di aeronautica e astronautica del MIT, la celebre università del Massachusetts.
I ricercatori hanno testato diversi droni in foreste simulate, generate in modo casuale, e hanno testato due droni in un’area boschiva all’interno del Centro di ricerca Langley dellsa NASA. In entrambi gli esperimenti, ogni drone ha mappato un’area di circa 20 metri quadrati in circa 2-5 minuti e la stazione di terra ha fuso insieme le mappe in tempo reale. I droni hanno anche ottenuto buoni risultati sotto diversi parametri, tra cui la velocità e il tempo complessivo per completare la missione, il rilevamento delle caratteristiche forestali e l’accurata fusione delle mappe.
Esplorazione e mappatura
Su ciascun drone, i ricercatori hanno montato un sistema LIDAR, uno scanner laser che crea una scansione bidimensionale degli ostacoli circostanti, “sparando” raggi laser e misurando gli impulsi riflessi. Il che va benissimo per rilevare gli alberi; tuttavia, agli occhi dei droni, i singoli alberi appaiono notevolmente simili. Se un drone non può riconoscere un dato albero, non può capire se ha già esplorato un’area.
I ricercatori hanno programmato i loro droni per identificare invece gli orientamenti di più alberi, che è molto più semplice che non distinguere un albero dall’altro. Con questo metodo, quando il segnale LIDAR restituisce un gruppo di alberi, un algoritmo calcola gli angoli e le distanze tra gli alberi per identificare quel cluster. “I droni possono usarlo come, dicimo così, firma unica per capire se hanno visitato questa zona prima o se si tratta di una nuova area”, dice Tian.
Questa tecnica di rilevamento aiuta la stazione di terra a unire con precisione le mappe. I droni in genere esplorano un’area in cerchio, producendo scansioni mentre volano. La stazione di terra monitora continuamente le scansioni. Quando due droni si aggirano intorno allo stesso gruppo di alberi, la stazione unisce le mappe calcolando la distanza e rotta relativa tra i droni, e quindi fondendo le singole mappe per mantenere gli orientamenti coerenti.
“Il calcolo di quella trasformazione relativa ti dice come dovresti allineare le due mappe in modo che corrisponda esattamente a come appare la foresta”, dice ancora Tian.
Nella stazione di terra, il software di navigazione robotico chiamato “simultaneous localization and mapping””, cioè “localizzazione e mappatura simultanea” (SLAM) utilizza l’ingresso LIDAR per localizzare e catturare la posizione dei droni. Questo aiuta a fondere le mappe con precisione.
Il risultato finale è una mappa tridimensionale con tutte le caratteristiche del terreno. Gli alberi appaiono come blocchi di tonalità colorate dal blu al verde, a seconda dell’altezza. Le aree inesplorate sono scure ma diventano grigie mentre sono mappate da un drone. Il software di pianificazione del percorso a bordo indica a un drone di esplorare sempre queste aree inesplorate e oscure mentre vola. “La produzione di una mappa 3D è più affidabile del semplice collegamento di una videocamera a un drone e monitoraggio del feed video”, afferma Tian. Ad esempio, la trasmissione di video a una stazione centrale richiede molta larghezza di banda che potrebbe non essere disponibile nelle aree boscose.