Dopo le impressionanti dimostrazioni di Qualcomm e Intel al CES, che hanno mostrato come la tecnologia è pronta a dare ai droni occhi digitali capaci di evitare gli ostacoli, è sempre più chiaro che qui si gioca la partita per i droni 2.0, quelli davvero pronti a volare da soli: oggi la legge non lo consente, ma le leggi sono destinate ad adattarsi alla realtà tecnologica, e la strada ormai è tracciata e porta a droni sempre più intelligenti, sicuri e capaci di cavarsela da soli.
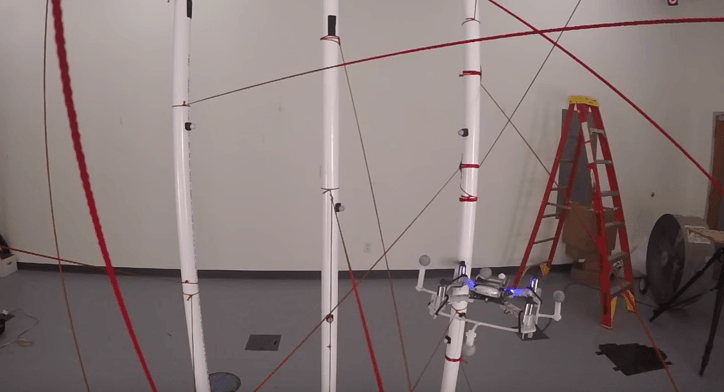
L’università del Massachusetts ha creato un algoritmo di “motion planning”, che potremmo tradurre come “pianificazione del movimento”, per permettere ai piccoli droni di volare autonomamene in un ambiente pieno di ostacoli. Il principio è semplice; identifica una serie di “obstacle free regions”, cioè aree dove non c’è il rischio di sbattere contro qualcosa, e li collega insieme con rotte anticollisione. Il codice è disponibile a tutti sul Web, in modo che la comunità degli smanettoni open source possa migliorarlo e integrarlo nella logica di bordo dei droni di tutti i giorni. Il drone sperimentale, 34 grammi per 92 millimetri di diametro si è mosso in una “foresta simulata” con ben 26 ostacoli senza sbattere mai. E lo stesso è riuscito a fare un drone ad ala fissa, che naturalmente ha più difficoltà di manovra rispetto al cugino multirotore. Il software crea una libreria di “tunnel” sicuri e liberi da ostacoli, in modo da poter selezionare rapidamente la rotta migliore senza rischio di trovarsi la strada ostruita.
Gallery








